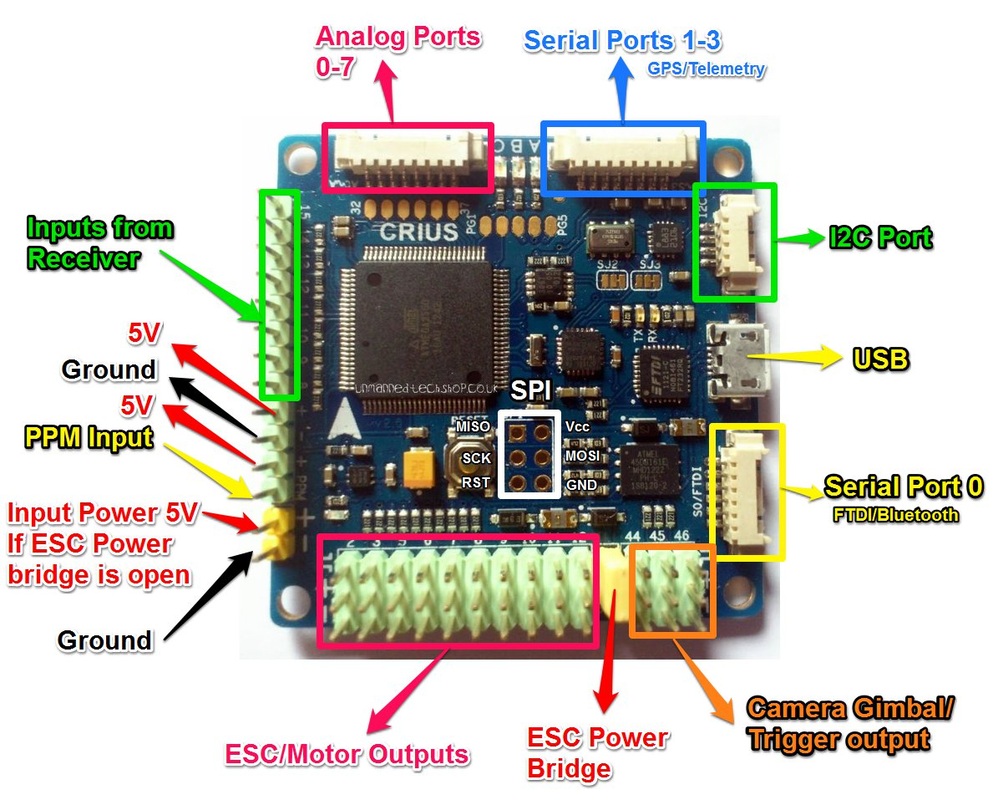
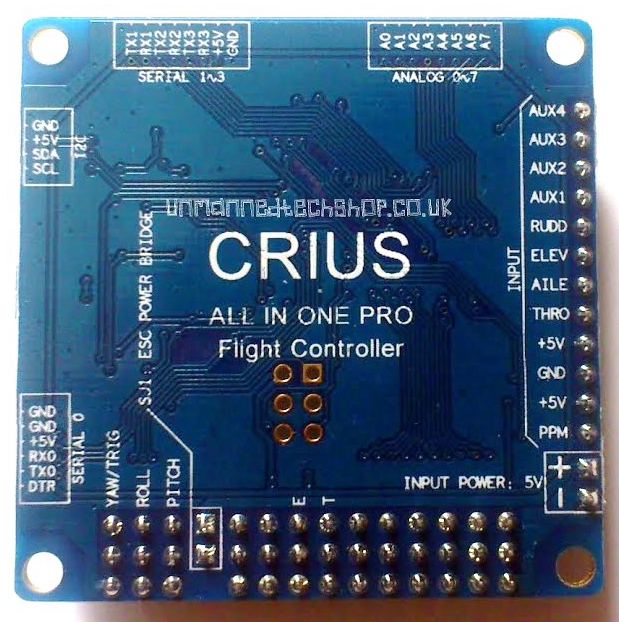
 The MegaPirates NG Code focuses on porting the Arducopter code over to various other controller boards, including the All in one Pro board that we sell. This guide will show you how to configure and setup your AIOP board to work with the MegaPirates NG code. The nice thing with the MegaPirates code is that it can be used with the ArduPilot Mission Planner - A graphical user interface for your autopilot The AIOP board can also run multiwii code if you want. All in One Pro Board Layout
Getting the MegaPirates Software/Tools
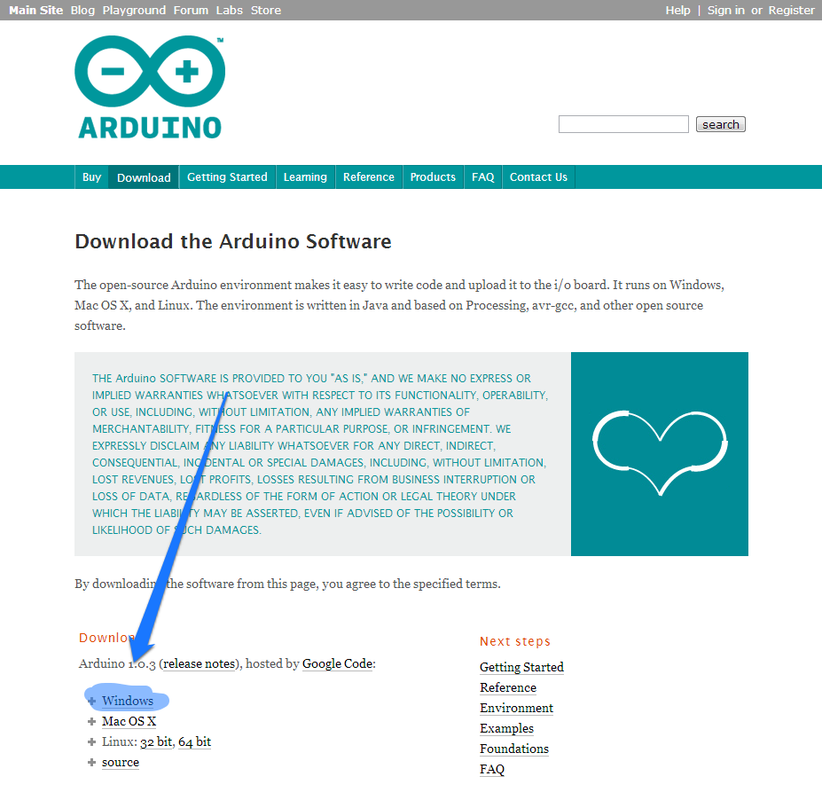
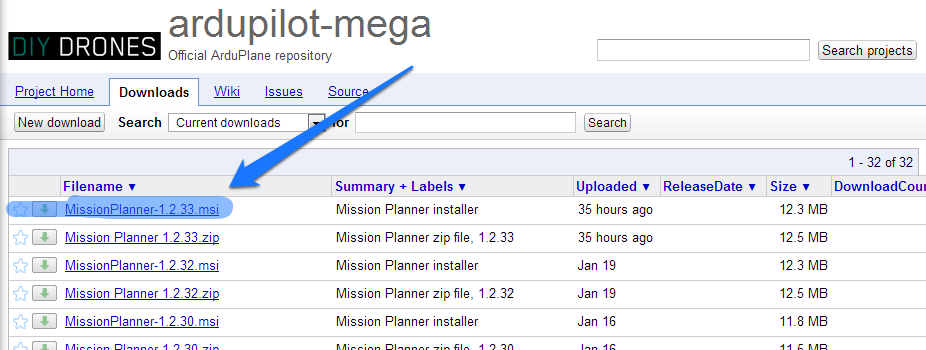
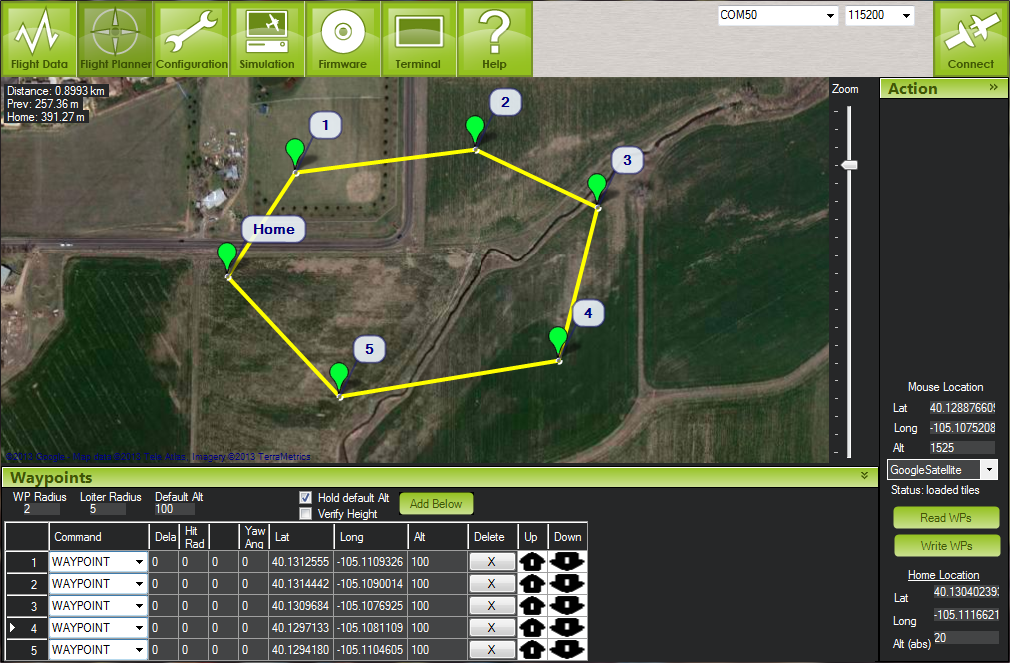
ArduPilot Mega Mission Planner Software
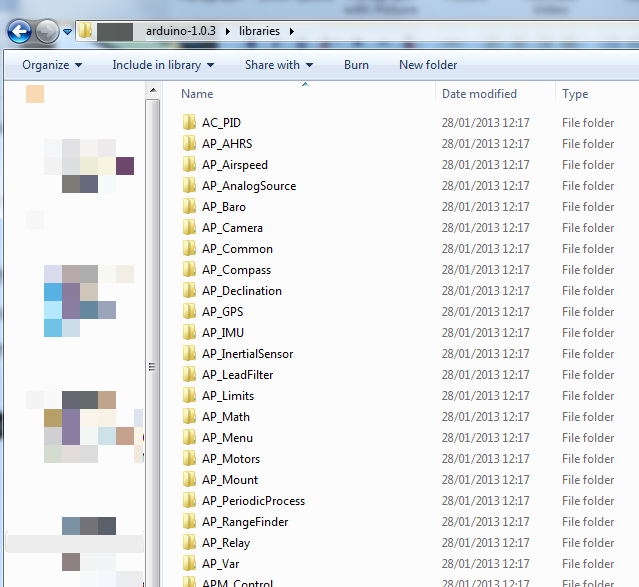
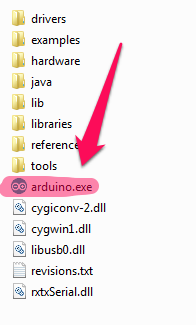
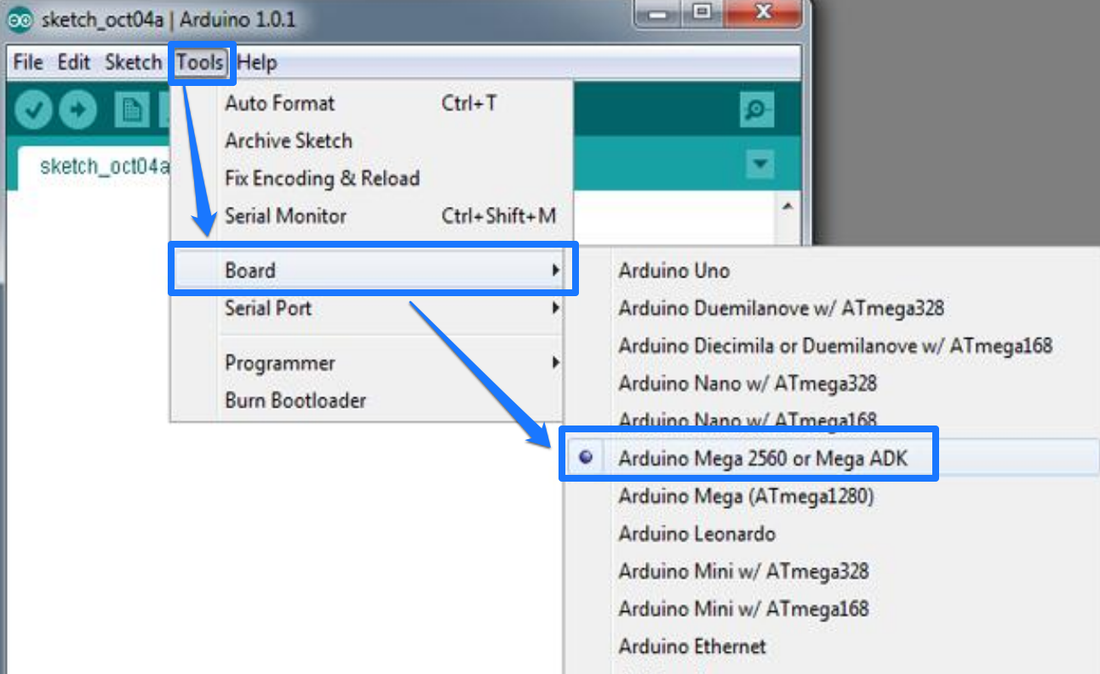
Setting Up Arduino
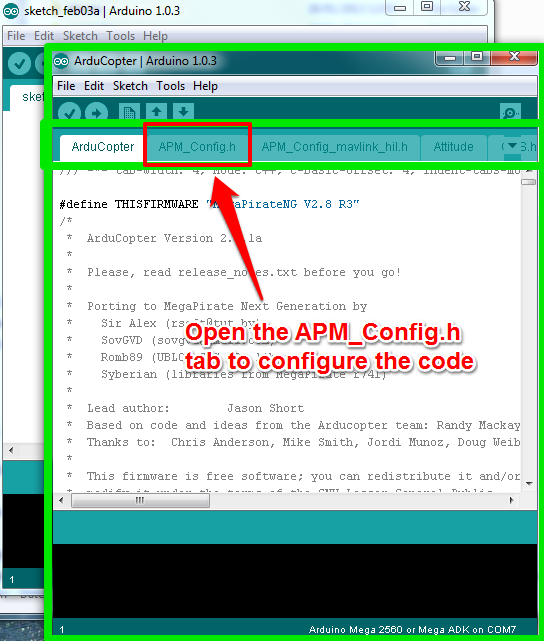
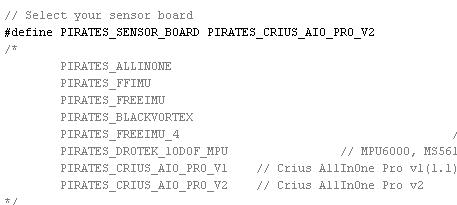
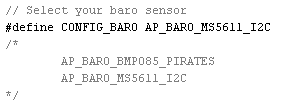
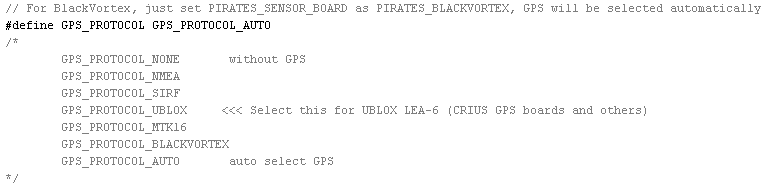
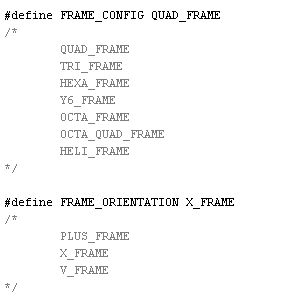
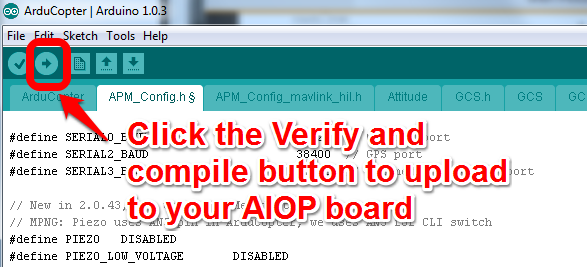
CONFIGURING and Uploading the MegaPirate Code
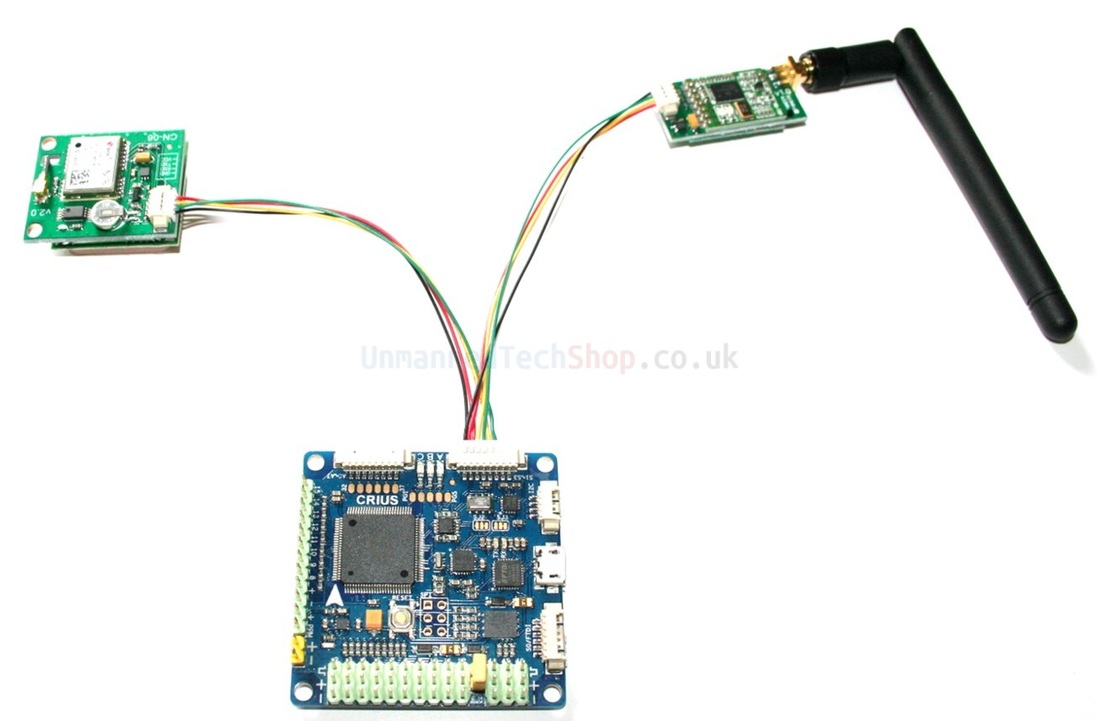
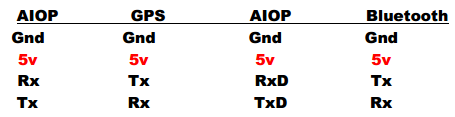
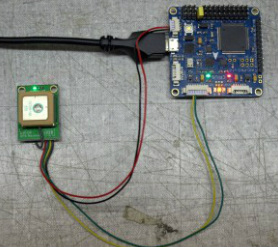
AIOP Megapirates Status LEDS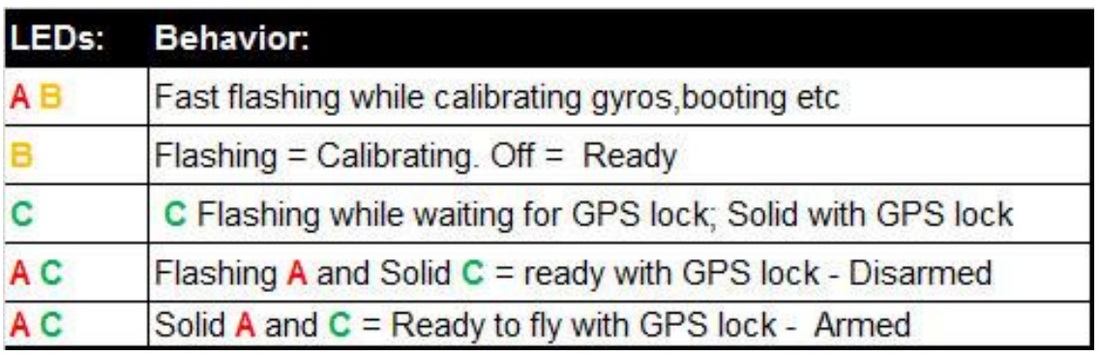 Connecting your GPS module Picture Credit - Gaza07 @multi-rotor.co.uk
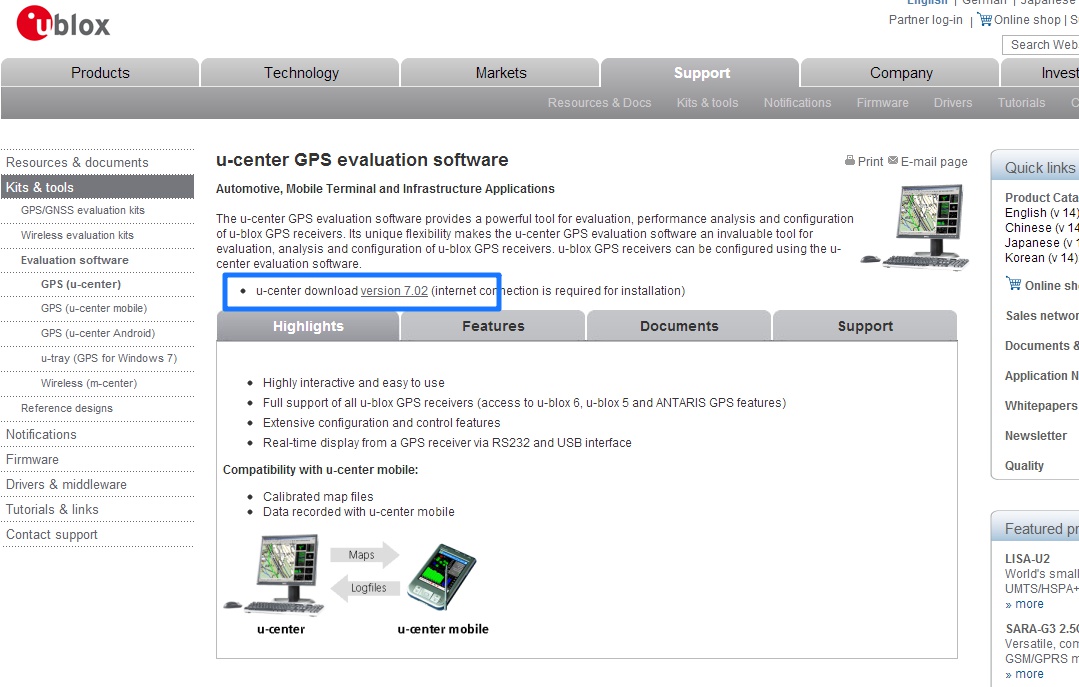
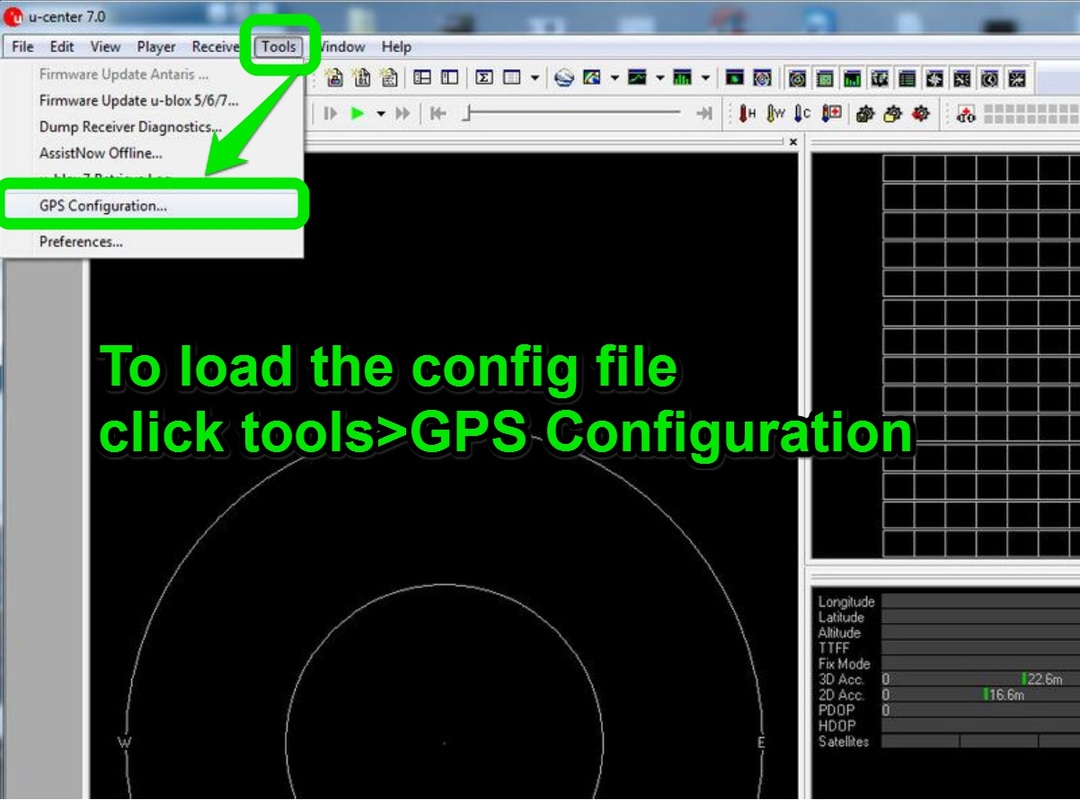
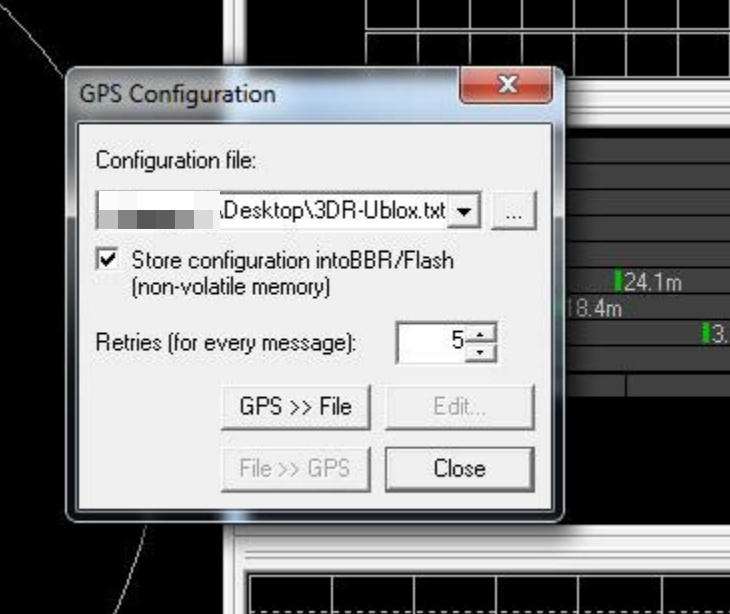
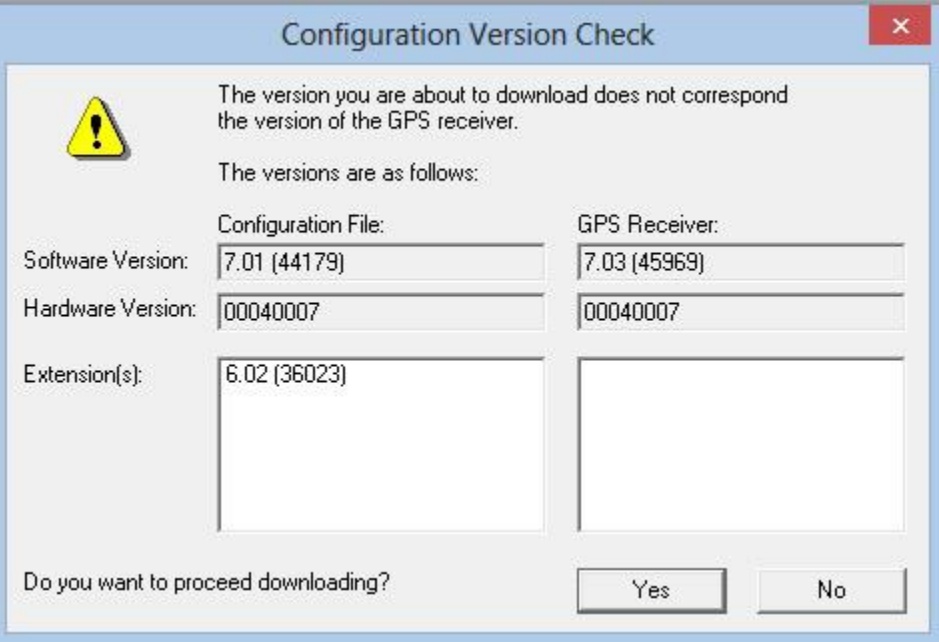
Configuring your GPS Module - Optional |


 |
|
|
 |
|
 |
|
 |
|
If you have any questions about setting up your All in one pro board, or any other general multirotor questions be sure to visit our forums to talk to other members!
Comments
 RSS Feed
RSS Feed